1.本发明涉及供水行业自动加药技术领域,尤其涉及一种絮凝智能加药控制系统及控制方法。
背景技术:
2.当今世界面临严重的水危机,水资源缺乏已成为关系到贫困、可持续发展乃至世界和平与安全的重大问题。我国是一个水资源短缺的国家,人多水少、水资源时空分布不均是我国的基本国情和水情,强化用水需求和用水过程管理,通过健全制度、落实责任、提高能力、强化监管,严格控制用水总量,全面提高用水效率,加强水务管理、节约用水、减少废水排放具有重要而深远的意义。
3.利用自动化控制进行水厂的日常生产和维护是近年来自来水行业发展的显著特点。自20世纪80年代,历经近30年的发展,水厂的自动化正逐步成熟,已涉及包括滤池自动化、加药自动化、水质检测自动化等几乎全水厂生产环节。水厂的自动化管理使日常运行中的人力成本大为降低,水厂的效率得到明显提高。
技术实现要素:
4.现有技术中存在的技术问题为:
5.人工添加药剂的投放量不准确的问题。
6.针对上述提出的技术问题,本发明提供了一种絮凝智能加药控制系统及控制方法,解决了传统人工添加药剂的投放量不准确。
7.本方案的技术手段为:
8.絮凝智能加药控制系统,包括:前馈单元、图像采集单元、反馈单元、控制单元,所述前馈单元中设置有水质传感器用于对水质参数进行检测,检测的水质信号为第一输出信号;
9.所述控制单元包括mcu处理器,所述muc处理器可对执行机构进行驱动控制、与计算机进行信号连接、对水质传感器的电源进行变换和处理、且其输入包括第一输入信号;
10.所述图像采集单元包括数量大于或等于三个的ccd图像采集设备,第一ccd图像采集设备设置在混合反应池的入口端1/4位置至絮凝反应池的出口处,第二ccd图像采集设备设置在平流沉淀池入口端的1/5处至1/3位置,第三ccd图像采集设备设置在平流沉淀池出口端1/3处至末端;
11.还包括设置在平流沉淀池出口端的浊度传感器。
12.本方案的工作原理为:该方案以源水流量、浊度、温度为初调节,采用浸入式引流采样、补光摄像采集特征图像,以现场形成的矾花图像为最终调节絮凝剂的投加量,并采用图像特征识别算法、三轴姿态测定算法追踪絮凝体的变化过程,通过机器识别、机器学习、模型理论、专家系统等建立人工智能系统,实现全自动调节和控制絮凝剂投加量,达到最佳投加效果;
13.在实际控制过程中,采用pid算法为基础融合人工智能的控制技术。以絮凝体在单位体积内的大小和数量为参考,建立控制数学模型,并且通过各种参数建立数学模型理论系统,实现机器识别、机器学习及人工智能功能的改进;再进行实时动态调整;调整范围以执行机构的最大投加量为限,以ccd摄像采集到的图像作为综合情况判断药剂反应状态,进行综合判断药剂的使用量是否过少或过多,并根据原水实时流量进行动态调整,出水口浊度进行微调修正的控制方式。
14.本方案具有人工智能、机器识别、机器学习、模型理论、专家系统、视频图像处理等多种专业技术,同时结合中间值处理的理论与实现,是絮凝体特征识别的最新应用,其核心技术的实现,展现了人工智能与图像识别技术的融合。
15.进一步地,所述水质传感器包括:流量传感器、浊度传感器、温度传感器及ph值传感器,所述mcu处理器与各水质传感器的接口相连。
16.首先对水质参数进行检测,从而使控制系统确定一个初步的投加药量并进行投加以便于与后续投加后的反应进行对比分析,提升了获取最终的投加量的准确性,其中mcu处理器可完成各水质传感器所需要的电源的变换和处理。
17.进一步地,所述ccd图像采集设备包括:图像取样窗、补光板、ccd相机、电源板、蠕动泵、自动清洗、箱体;
18.所述图像取样窗设置在箱体内部,所述图像取样窗与设置在箱体上的进水口相连,所述图像取样窗的一侧设置有补光板,另一侧设置有ccd相机,所述电源板用于给补光板、蠕动泵、ccd相机供电,所述蠕动泵设置在所述箱体中与所述图像取样窗连接。
19.当ccd图像采集设备下沉到水中时,采用自动补光板进行内部补光,避免了自然光线对图像的获取结果造成的影响;图像取样窗的长、宽、高均可进行控制,放置图像重叠;采用可调节流量的蠕动泵来控制图像取样窗周围的流速,防止外部流速影响图像拍摄质,为了防止絮凝体被蠕动泵破坏,采用自然流入,蠕动泵吸出的方式。
20.进一步地,还包括用于清洗图像取样窗的清洗装置,所述清洗装置上设置有电磁阀,所述控制单元通过控制电磁阀的开闭对所述图像取样窗进行清洗。
21.利用对图像取样窗上获取的图像进行识别计算,确定图像采集系统是否进行清洗,如果需要清洗则打开所述电磁阀通过高压清洁水对图像采集窗口进行清洗,避免了由于图像采集窗上的杂质和影响控制系统的检测精密度,从而影响最终的投加量。
22.进一步地,所述执行机构包括:变频器、计量泵,所述变频器通过对muc处理器输出的投药量信号进行计算,从而控制计量泵进行加药。
23.实现投药的自动化,避免了人工加药造成的误差,并且提升了加药的效率,解决了加药滞后的问题。
24.进一步地,所述计算机通过图像识别算法、三轴姿态测定算法对图像采集单元采集的信息进行处理和计算,并将计算出的投加量信号反馈给控制单元。
25.采用图像识别和三轴姿态测定算法能够有效的确定矾花的粗略姿态,能保证精对准工作要求,保证投加量计算的准确度。
26.进一步地,所述箱体的材料为铝合金。
27.所述箱体的表面做了防腐处理,提升了ccd图像采集设备的使用寿命,在一定程度上减少了成本。
28.本发明还提供了一种絮凝智能加药控制方法,包括如下步骤:
29.1)絮凝智能控制系统首先根据进水水源的流量、浊度、温度、及ph值得变化确定一个初步的投加药量,并将信号传给计量泵进行絮凝剂的初始投加
30.2)絮凝剂初始投加后在混合反应池的入口端1/4位置至絮凝反应池的出口处,该处位置矾花处于絮凝完成并向长大方向过渡阶段,能基本观察出矾花多少和大小,同时能够有效缩短反应滞后时间;在该位置通过摄像对投加量的准确度进行第一次识别,根据识别情况第一次修正絮凝剂的加入量。
31.3)在平流沉淀池前1/5至前1/3处,该处矾花基本长到最大,且容易出现矾花大量沉淀而分层,从而提前实现对反应结果的预判;进行第二次图像摄取,并对摄取的图像进行辨别,以快速对投加量做出判别并修正计量泵的投加量。
32.4)在平流沉淀后1/3至末端,该处能有效观察矾花颗粒大小、多少、水体清澈度等,结合沉淀池前段观察结果,对比其矾花颗粒特征出现的梯度变化及其变化大小,由此可预判后续过程沉淀出水浊度;进行第三次图像摄取,并再次摄像观测絮凝物的特征根据图像情况对絮凝剂投加量再次做出调整。
33.5)通过浊度传感器对平流沉淀池的出水口进行浊度监测,根据该输出信号对絮凝剂的投加量进行最终修正,将最终修正的投加量信号传输给所述控制器单元,进而控制执行机构对溶液池进行加药。
34.本发明与现有技术相比,具有如下的优点和有益效果:
35.本发明通过对絮凝反应池和平流沉淀池中的多个位置设置多个ccd图像采集设备对矾花颗粒大小、多少、水体清澈度进行观察,从而可以通过不同的时期的图像变化对矾花形成过成进行动态的分析,预判沉淀池出水的浊度,并进行了多次修正,并且通过机器识别、机器学习、模型理论、专家系统等人工智能系统自动识别和学习最佳投加的过程。不仅解决了传统人工添加药剂的投放量不准确,并且避免了添加滞后问题,采用控制单元对执行机构进行控制,采用计算机对图像进行处理,不仅能够实时观测到沉淀池中加入药剂后的反应情况,而且能够自动将处理和计算后设定的投加量信号传输到控制单元中,利用控制执行单元自动最加料进行控制。
附图说明
36.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
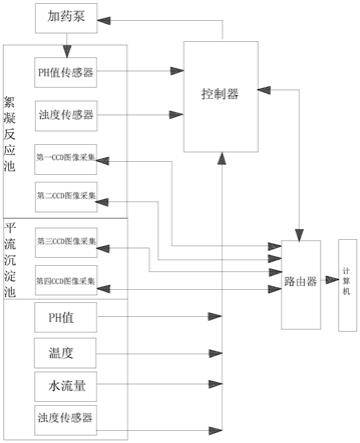
37.图1为本发明的一种絮凝智能加药控制系统框图;
38.图2为本发明的ccd图像采集设备的结构示意图;
39.图3为本发明的投加自动调节装置的控制系统框图;
40.图4为本发明的软件控制系统框图;
41.图5为本发明的软件控制流程图。
42.图中的附图标记分别为:1-进水口;2-图像取样窗;3-ccd相机;4-电源板;5-清洗进水口;6-蠕动泵;7-补光板。
具体实施方式
43.参照说明书附图对本发明的一种絮凝智能加药控制系统及控制方法,作以下详细地说明。
44.实施例1:
45.如图1至图5所示,一种絮凝智能加药控制系统,包括:前馈单元、图像采集单元、控制单元,所述前馈单元中设置有水质传感器用于对水质参数进行检测,检测的水质信号为第一输出信号;
46.所述控制单元包括mcu处理器,所述muc处理器可对执行机构进行驱动控制、与计算机进行信号连接、对水质传感器的电源进行变换和处理、且其输入包括第一输入信号;
47.所述图像采集单元包括数量大于或等于三个的ccd图像采集设备,第一ccd图像采集设备设置在混合反应池的入口端1/4位置至絮凝反应池的出口处,第二ccd图像采集设备设置在平流沉淀池入口端的1/5处至1/3位置,第三ccd图像采集设备设置在平流沉淀池出口端1/3处至末端;
48.还包括设置在平流沉淀池出口端的浊度传感器。
49.本方案的工作原理为:该方案以源水流量、浊度、温度为初调节,以现场形成的矾花图像为最终调节絮凝剂的投加量,并通过图像识别算法、三轴姿态测定算法追踪絮凝体的变化过程,实现全自动调节和控制絮凝剂投加量,达到最佳投加效果;
50.在实际控制过程中,采用pid算法为基础融合人工智能的控制技术。以絮凝体在单位体积内的大小和数量为参考,建立控制数学模型,进行实时动态调整;调整范围以执行机构的最大投加量为限,以ccd图像采集到的图像作为综合情况判断药剂反应状态,进行综合判断药剂的使用量是否过少或过多,并根据原水实时流量进行动态调整,出水口浊度进行微调修正的控制方式。
51.本发明中所述计算机支持手动和自动控制,可进行用户参数配置;系统采用采用pid算法为基础融合人工智能的技术进行控制,pid参数开放可设置;支持ccd图像预处理(平滑滤波,均值滤波,中值滤波算法预处理),提高图像识别准确度,絮凝体正确识别率95%及以上;准确统计絮凝体大小和数量,絮凝物直径及数量检测准确度达到95%及以上;外部传感器和图像ccd采集点数量可配置;支持原水流量分段设置或者外部传感器实时流量输入;用户界面可实时显示当前的浊度,温度,ph值等参数;界面告警显示;软件支持标准ccd图片采集和分析标准絮凝参数,作为控制系统控制标准;软件采用数据库进行存储系统参数和工作日志数据;软件支持单路图像的实时显示(可配置ccd采样点进行实时显示);沉淀池出水浊度达到用户要求及国家标准,控制范围0-3ntu。
52.实施例2:
53.实施例2是在实施例1的基础上做出的进一步的限定,如图1至图5所示:
54.进一步地,所述水质传感器包括:流量传感器、浊度传感器、温度传感器及ph值传感器,所述mcu处理器与各水质传感器的接口相连。
55.首先对水质参数进行检测,从而使控制系统确定一个初步的投加药量并进行投加以便于与后续投加后的反应进行对比分析,提升了获取最终的投加量的准确性,其中mcu处理器可完成各水质传感器所需要的电源的变换和处理。
56.进一步地,所述ccd图像采集设备包括:图像取样窗2、补光板7、ccd相机3、电源板
4、蠕动泵5、清洗口6、箱体;
57.所述图像取样窗2设置在箱体内部,所述图像取样窗2与设置在箱体上的进水口1相连,所述图像取样窗2的一侧设置有补光板7,另一侧设置有ccd相机3,所述电源板4用于给补光板7、蠕动泵6、ccd相机3供电,所述蠕动泵6设置在所述箱体中与所述图像取样窗2连接。
58.当ccd图像采集设备下沉到水中一定深度时,采用补光板7自动进行内部补光,避免了自然光线最图像的获取结果造成的影响;图像取样窗2的长、宽、高均可进行控制,放置图像重叠;采用可调节流量的蠕动泵6来控制图像取样窗2周围的流速,防止外部流速影响图像拍摄质,为了防止絮凝体被蠕动泵6破坏,采用自然流入,蠕动泵6吸出的方式。
59.进一步地,还包括用于清洗图像取样窗2的清洗装置,所述清洗装置上设置有电磁阀,所述控制单元通过控制电磁阀的开闭对所述图像取样窗2进行清洗。
60.利用对图像取样窗2上获取的图像进行识别计算,确定图像采集系统是否进行清洗,如果需要清洗则打开所述电磁阀通过高压清洁水对图像采集窗口进行清洗,避免了由于图像采集窗上的杂质和影响控制系统的检测精密度,从而影响最终的投加量。
61.进一步地,所述执行机构包括:变频器、计量泵,所述变频器通过对muc处理器输出的投药量信号进行计算,从而控制计量泵进行加药。
62.实现投药的自动化,避免了人工加药造成的误差,并且提升了加药的效率,解决了加药滞后的问题。
63.进一步地,所述计算机通过图像识别算法、三轴姿态测定算法对图像采集单元采集的信息进行处理和计算,并将计算出的投加量信号反馈给控制单元。
64.采用图像识别和三轴姿态测定算法能够有效的确定矾花的粗略姿态,能保证精对准工作要求,保证投加量计算的准确度。
65.进一步地,所述箱体的材料为铝合金。
66.所述箱体的表面做了防腐处理,提升了ccd图像采集设备的使用寿命,在一定程度上减少了成本。
67.实施例3:
68.实施例3是在实施例2基础上提出的一种具体的实现方法,如图1至图5所示:
69.本发明还提供了一种絮凝智能加药控制方法,包括如下步骤:
70.1)絮凝智能控制系统首先根据进水水源的流量、浊度、温度、及ph值得变化确定一个初步的投加药量,并将信号传给计量泵进行絮凝剂的初始投加
71.2)絮凝剂初始投加后在混合反应池的入口端1/4位置至絮凝反应池的出口处,该处位置矾花处于絮凝完成并向长大方向过渡阶段,能基本观察出矾花多少和大小,同时能够有效缩短反应滞后时间;在该位置通过摄像对投加量的准确度进行第一次识别,根据识别情况第一次修正絮凝剂的加入量。
72.3)在平流沉淀池前1/5至前1/3处,该处矾花基本长到最大,且容易出现矾花大量沉淀而分层,从而提前实现对反应结果的预判;进行第二次图像摄取,并对摄取的图像进行辨别,以快速对投加量做出判别并修正计量泵的投加量。
73.4)在平流沉淀后1/3至末端,该处能有效观察矾花颗粒大小、多少、水体清澈度等,结合沉淀池前段观察结果,对比其矾花颗粒特征出现的梯度变化及其变化大小,由此可预
判后续过程沉淀出水浊度;进行第三次图像摄取,并再次摄像观测絮凝物的特征根据图像情况对絮凝剂投加量再次做出调整。
74.5)通过浊度传感器对平流沉淀池的出水口进行浊度监测,根据该输出信号对絮凝剂的投加量进行最终修正,将最终修正的投加量信号传输给所述控制器单元,进而控制执行机构对溶液池进行加药。
75.实施例4:
76.本实施例是在实施例3的基础上提出的一种具体的实现方式,如图1至图5所示:
77.在混合反应池的入口端1/4位置至絮凝反应池的出口处设置有两个ccd图像采集设备分别编号1、2;在平流沉淀池前1/5至前1/3处设置一个ccd图像采集设备为编号3;在平流沉淀后1/3至末端分别设置一个ccd图像采集设备为编号4,再对池中的原水的浊度及各种参数进行检测;
78.当原水浊度<20ntu,初始用药量在14~24kg/kt;
79.原水浊度<100ntu,初始用药量在20~50kg/kt;
80.原水浊度100~200ntu,初始用药量约为30~65kg/kt;
81.原水浊度200~600ntu,初始用药量约为40~100kg/kt;
82.原水浊度>600ntu,初始用药量约为80~150kg/kt。
83.对四个ccd图像采集设备采集的图像进行监测;四个ccd图像采集设备处浊度和投药量的关系表如下表1所示。
84.表1 ccd图像采集设备处浊度和投药量的关系
[0085][0086]
根据絮凝反应池和平流沉淀池中的矾花颗粒的情况来判断加药量是否过量或不足,以下为具体判断依据:
[0087]
投加过量特征表现:
[0088]
絮凝反应池中后段或平流沉淀池进口处即出现大量、大颗粒矾花,同时,平流沉淀池中后段(甚至整个沉淀池)或者斜管沉淀池,出现大量大颗粒矾花不沉降、但水体与絮凝体出现清晰分离现象,沉淀池出水浊度通常不是太高。
[0089]
投加量不足特征表现:
[0090]
絮凝池中后段出现的矾花颗粒较小,且数量较少(较适量情况),至沉淀池中后段水体仍然浑浊(微细颗粒与水分离不清晰),而且沉淀池出水絮体少但浊度较高。
[0091]
加量不足特征信号:矾花较小且少、沉淀慢、水体浑浊,余浊大。
[0092]
适量情况特征表现:
[0093]
絮凝池后段至平流池进口段已出现大量、大颗粒矾花,且在沉淀池前1/3至后1/3处因大颗粒矾花下沉而出现的明显分层现象(之前出现大量矾花漂浮,之后大颗粒沉淀,小颗粒漂浮),直至清澈见底。同时沉淀池出水浊度较低,符合规定要求。
[0094]
投加适量特征信号:矾花较多且大、沉淀快、分层明显,水体清澈,余浊低。
[0095]
因此可根据以上投加适量的特征信号通过控制单元对执行机构进行控制,实现实时的投加量控制和监测,保证达到国家标准合格的浊度范围为0-2ntu。
[0096]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种絮凝智能加药控制系统,包括:前馈单元、图像采集单元、反馈单元、控制单元,其特征在于,所述前馈单元中设置有用于对水质参数进行检测的水质传感器,检测的水质参数信号为第一输出信号;所述控制单元包括mcu处理器,所述muc处理器可对执行机构进行驱动控制、与计算机进行信号连接、对水质传感器的电源进行变换和处理、且其输入包括第一输入信号,是实现人工智能投加控制的核心;所述图像采集单元包括数量大于或等于三个的ccd图像采集设备,第一ccd图像采集设备设置在混合反应池的入口端的1/4位置至絮凝反应池的出口处,第二ccd图像采集设备设置在平流沉淀池入口端的1/5处至1/3位置,第三ccd图像采集设备设置在平流沉淀池出口端1/3处至末端;还包括设置在平流沉淀池出口端的浊度传感器。2.根据权利要求1所述的一种絮凝智能加药控制系统,其特征在于,所述水质传感器包括:流量传感器、浊度传感器、温度传感器及ph值传感器,所述mcu处理器与各水质传感器的接口相连。3.根据权利要求1所述的一种絮凝智能加药控制系统,其特征在于,所述ccd图像采集设备包括:图像取样窗(2)、补光板(7)、ccd相机(3)、电源板(4)、蠕动泵(5)、清洗口(6)、箱体;所述图像取样窗(2)设置在箱体内部,所述图像取样窗(2)与设置在箱体上的进水口(1)相连,所述图像取样窗(2)的一侧设置有补光板(7),另一侧设置有ccd相机(3),所述电源板(4)用于给补光板(7)、蠕动泵(6)、ccd相机(3)供电,所述蠕动泵(6)设置在所述箱体中与所述图像取样窗(2)连接。4.根据权利要求1所述的一种絮凝智能加药控制系统,其特征在于,还包括用于清洗图像取样窗(2)的清洗装置,所述清洗装置上设置有电磁阀,所述控制单元通过控制电磁阀的开闭对所述图像取样窗(2)进行清洗。5.根据权利要求1所述的一种絮凝智能加药控制系统,其特征在于,所述执行机构包括:变频器、计量泵,所述变频器通过对muc处理器输出的投药量信号进行计算,从而控制计量泵进行智能加药。6.根据权利要求1所述的一种絮凝智能加药控制系统,其特征在于,所述计算机通过图像识别算法、三轴姿态测定算法对图像采集单元采集的信息进行处理和计算,并将计算出的投加量信号反馈给控制单元从而控制执行机构进行精确的投加药剂。7.根据权利要求3所述的一种絮凝智能加药控制系统,其特征在于,所述箱体的材料为铝合金。8.一种絮凝智能加药控制方法,其特征在于,采用权利要求1至7任一所述的一种絮凝智能加药控制系统,包括如下步骤:1)通过水质传感器对水质参数确定一个初步的投加量,并将信号传递给执行机构进行初始投加;2)在絮凝反应池的出口处或混合反应池的1/4位置进行第一次图像摄取,通过计算机对图像信息进行计算,进而对对絮凝剂的投加量进行第一次修正;3)在平流沉淀池入口端的1/5处至1/3位置进行第二次图像摄取,通过计算机对图像信
息进行计算,进而对对絮凝剂的投加量进行第二次修正;4)在平流沉淀池出口端1/3处至末端进行第三次图像摄取,通过计算机对图像信息进行计算,进而对对絮凝剂的投加量进行第三次修正;5)通过浊度传感器对平流沉淀池的出水口进行浊度监测,根据该输出信号对絮凝剂的投加量进行最终修正,将最终修正的投加量信号传输给所述控制器单元,进而控制执行机构对溶液池进行加药。
技术总结
本发明公开了一种絮凝智能加药控制系统及控制方法,通过对絮凝反应池和平流沉淀池中设置多个CCD图像采集设备对矾花颗粒进行观察,通过不同的时期的图像变化对矾花形成过成进行动态分析,预判沉淀池出水的浊度,进行多次修正,并且通过机器识别、机器学习、模型理论等人工智能系统自动识别和学习最佳投加的过程。本方案,采用控制单元对执行机构进行控制,采用计算机对图像进行处理,不仅能够实时观测到沉淀池中加入药剂后的反应情况,而且能够自动将处理和计算后设定的投加量信号传输到控制单元中,利用控制执行单元自动最加料进行控制,不仅解决了传统人工添加药剂的投放量不准确,并且避免了添加滞后问题。并且避免了添加滞后问题。并且避免了添加滞后问题。
技术开发人、权利持有人:向德明 黎定官

