1.本高新技术涉及地下水管理设备领域,具体而言,涉及一种用于地下水修复的生物材料投放设备。
背景技术:
2.现在的用于地下水修复的生物材料投放,常常需要人为定时向地下水井进行投放生物材料,但是由于在待修复的区域,面经宽广,相邻的水井之间的位置较远,且需要周期投放,造成投放效率低,需要大量人工的问题。
技术实现要素:
3.本高新技术为了解决现有技术中向地下水井投放生物材料效率低,人工成本高的问题,提供了一种用于地下水修复的生物材料投放设备,包括移动式平台、可与所述移动式平台的一角铰接的第一连杆、与所述第一连杆的末端铰接的第二连杆、与所述第二连杆的末端连接的用于抓取生物材料罐的机械手,所述移动式平台上还设置有用于存放生物材料罐的储料架,所述储料架设置有出料位,所述第一连杆和第二连杆可被驱动从所述出料位抓取生物材料罐,并将所述生物材料罐投放到所述投放设备之外的地下水井中。
4.进一步地,所述第二连杆中部还设有线缆轮,所述线缆轮上缠绕着线缆,所述第二连杆的末端设置安装座,所述机械手可相对所述安装座滑动,所述线缆的末端与所述机械手的吊孔连接,所述线缆轮转动使得机械手进入到所述安装座中,或者使得所述机械手从所述安装座中释放。
5.进一步地,所述安装座底部设置有通孔,所述线缆穿过所述通孔与所述吊孔连接。
6.进一步地,所述安装座的延伸方向与所述第二连杆的延伸方向具有夹角,使得所述机械手在所述出料位抓取生物材料罐时,所述机械手的开口朝正下方。
7.进一步地,所述储料架上设置有向下倾斜的斜面,所述斜面的末端设置所述出料位,所述斜面用于承载并排设置的生物材料罐。
8.进一步地,所述移动式平台上设置有车轮、驱动所述车轮转动地驱动装置、采集图像的摄像头。
9.本高新技术中的投放设备,能够临近遥控操作、远程遥控或者将来设置成自主运行的方式进行投放操作,通过第一连杆、第二连杆的联动,将生物材料罐从移动平台上抓取,然后投放到地下水井中。
附图说明
10.通过参考附图会更加清楚的理解本高新技术的特征和优点,附图是示意性的而不应理解为对本高新技术进行任何限制,在附图中:
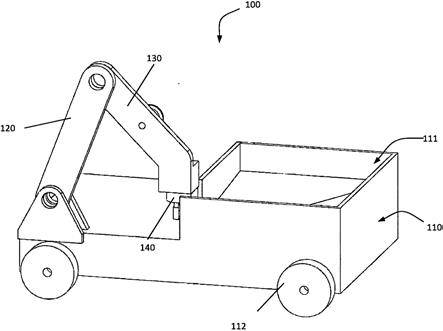
11.图1为本高新技术一些实施例中的用于地下水修复的生物材料投放设备的整体结构示意图;
12.图2为本高新技术一些实施例中的用于地下水修复的生物材料投放设备的另一个视角的整体结构示意图;
13.图3为本高新技术一些实施例中的用于地下水修复的生物材料投放设备趋向俯视的整体结构示意图;
14.图4至图7为本高新技术一些实施例中的用于地下水修复的生物材料投放设备的工作状态示意图。
具体实施方式
15.为了能够更清楚地理解本高新技术的上述目的、特征和优点,下面结合附图和具体实施方式对本高新技术进行进一步的详细描述。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
16.在下面的描述中阐述了很多具体细节以便于充分理解本高新技术,但是,本高新技术还可以采用其他不同于在此描述的其他方式来实施,因此,本高新技术的保护范围并不受下面公开的具体实施例的限制。
17.现有技术为了改善地下水水质问题,采用向地下水中投放生物材料,具体操作如下:利用微生态修复技术对地下水治理区域进行修复。在待修复区域钻井,1000平米一座,在治理区域所有水井进行生物材料投放,每7天投放一次,连续投放一年。如果采用人工进行投放,非常耗费人力,且操作效率较低。本高新技术提供了一种投放设备能够进行快速地进行投放,效率得到较大提升。
18.具体得,参照图1至图7,本高新技术实施例提供了一种用于地下水修复的生物材料投放设备100,包括移动式平台110、可与所述移动式平台110的一角铰接的第一连杆120、与所述第一连杆120的末端铰接的第二连杆130、与所述第二连杆130的末端连接的用于抓取生物材料罐的机械手140,所述移动式平台110上还设置有用于存放生物材料罐的储料架111,所述储料架111设置有出料位1111,所述第一连杆120和第二连杆130可被驱动从所述出料位1111抓取生物材料罐,并将所述生物材料罐投放到所述投放设备100之外的地下水井200 中。
19.本高新技术中投放设备100能够操作第一连杆120、第二连杆130和机械手140进行工作,实现抓取生物材料罐,然后进行移动到生物材料罐处于地下水禁200上方时,进行投放操作。操作简单,效率高,能够满足周期大规模使用的要求。
20.所述第一连杆120和第二连杆130可通过电机进行驱动转动。
21.进一步地,所述第二连杆130中部还设有线缆轮150,所述线缆轮150上缠绕着线缆151,所述第二连杆130的末端设置安装座131,所述机械手140可相对所述安装座131滑动,所述线缆151的末端与所述机械手140的吊孔141连接,所述线缆轮150转动使得机械140手进入到所述安装座131中,或者使得所述机械手140从所述安装座131中释放。所述机械手 140后部连接的线缆151,可以使得机械手140被释放进入到地下水井200中,甚至可以到达地下水面,保证了生物材料罐中的生物材料进入到地下水中。所述线缆151中可以设有用于与机械手的40电连接的导线。
22.进一步地,所述安装座131底部设置有通孔1311,所述线缆151穿过所述通孔1311与所述吊孔141连接。这样,机械手140回收时,可以顺利地让机械手140滑入到所述安装座
131 中。一般地,可以适当地让机械手140的底座设置成圆形,所述安装座131的安装腔截面也为圆形,底座的半径略小于所述安装腔截面的半径。所述机械手140可以采用二指机械手,驱动方式可以采用液压驱动,也可采用电机驱动。
23.进一步地,为了便于抓取生物材料罐,可以对机械手140的抓取姿态进行控制,为了减少相应的自由度控制,可以设置机械手140处于出料位的位置时,机械手140的抓取姿态较优,即机械手140的开口朝下,便于抓取,具体地,所述安装座131的延伸方向与所述第二连杆130的延伸方向具有夹角,使得所述机械手140在所述出料位1111抓取生物材料罐时,所述机械手140的开口朝正下方。在一些实施方式中,所述夹角可以为135度。
24.进一步地,所述储料架111上设置有向下倾斜的斜面1112,所述斜面1112的末端设置所述出料位1111,所述斜面1112用于承载并排设置的生物材料罐。通过倾斜的设置,使得生物材料罐能够自动滑动到所述出料位1111,减少了机械设备的复杂度。
25.进一步地,所述移动式平台110上设置有车轮112、驱动所述车轮112转动地驱动装置和采集图像的摄像头。所述摄像头能够采集周围环境信息,也可用于判断移动平台相对地下水井的位置是否合适,是否便于投放,方便了远程操作者的操作。
26.本高新技术中的设备的运行过程如下,参见图3至图7,移动式平台110运动靠近地下水井200的位置,然后所述第一连杆120和所述第二连杆130被联合驱动,使得机械手140到达出料位1111,然后机械手140抓取生物材料罐(顶部被揭开),然后第一连杆120和所述第二连杆130共同被驱动,向投放位置进行运动,然后进行投放;在一些实施方式中,在向投放位置进行运动过程中,所述线缆轮150进行转动一部分,释放所述机械手140离开第二连杆130,然后到达运动位时,所述线缆轮150继续进行转动释放,所述机械手140向地下水井200底部运动,直至运动距离水面较近的位置,机械手140释放生物材料罐,然后进行回收,为下一投放点做准备。
27.本高新技术中设置第二连杆130的末端朝向使得机械手140运动到出料位1111时不需要再调整姿态,减少了控制了自由度,所述机械手140从安装座131中被释放时,由于线缆151 和重力的作用,使得机械手的朝向始终朝下,避免了生物材料罐旋转,保证了生物材料罐的安全性。
28.本高新技术中,所述第一连杆120与移动式平台110之间的铰接点位于移动式平台的一角,给第一连杆120和所述第二连杆130提供了较宽的运动空间,便于控制,铰接点与水井的位置更加靠近,减小了第一连杆和所述第二连杆的旋转量,效率得到提升。
29.图3中机械手位于出料位1111进行抓取,图4中,机械手140运动离开出料位1111,图 5中线缆轮150旋转释放所述机械手140,图5中示意的释放机械手时俯视角度图,图6中,示意机械手运动到投放位置时,图7中,线缆轮150继续旋转释放机械手140进入到地下水井200中。
30.本高新技术中的投放设备,能够临近遥控操作、远程遥控或者将来设置成自主运行的方式进行投放操作,通过第一连杆、第二连杆的联动,将生物材料罐从移动平台上抓取,然后投放到地下水井中。
31.在本高新技术中,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。术语“多个”指两个或两个以上,除非另有明确的限定。
32.以上所述仅为本高新技术的优选实施例而已,并不用于限制本高新技术,对于本
领域的技术人员来说,本高新技术可以有各种更改和变化。凡在本高新技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本高新技术的保护范围之内。
技术特征:
1.一种用于地下水修复的生物材料投放设备,其特征在于,包括移动式平台、可与所述移动式平台的一角铰接的第一连杆、与所述第一连杆的末端铰接的第二连杆、与所述第二连杆的末端连接的用于抓取生物材料罐的机械手,所述移动式平台上还设置有用于存放生物材料罐的储料架,所述储料架设置有出料位,所述第一连杆和第二连杆可被驱动从所述出料位抓取生物材料罐,并将所述生物材料罐投放到所述投放设备之外的地下水井中。2.根据权利要求1所述的用于地下水修复的生物材料投放设备,其特征在于,所述第二连杆中部还设有线缆轮,所述线缆轮上缠绕着线缆,所述第二连杆的末端设置安装座,所述机械手可相对所述安装座滑动,所述线缆的末端与所述机械手的吊孔连接,所述线缆轮转动使得机械手进入到所述安装座中,或者使得所述机械手从所述安装座中释放。3.根据权利要求2所述的用于地下水修复的生物材料投放设备,其特征在于,所述安装座底部设置有通孔,所述线缆穿过所述通孔与所述吊孔连接。4.根据权利要求2所述的用于地下水修复的生物材料投放设备,其特征在于,所述安装座的延伸方向与所述第二连杆的延伸方向具有夹角,使得所述机械手在所述出料位抓取生物材料罐时,所述机械手的开口朝正下方。5.根据权利要求1所述的用于地下水修复的生物材料投放设备,其特征在于,所述储料架上设置有向下倾斜的斜面,所述斜面的末端设置所述出料位,所述斜面用于承载并排设置的生物材料罐。6.根据权利要求1所述的用于地下水修复的生物材料投放设备,其特征在于,所述移动式平台上设置有车轮、驱动所述车轮转动地驱动装置、采集图像的摄像头。
技术总结
本高新技术涉及一种用于地下水修复的生物材料投放设备,包括移动式平台、可与所述移动式平台的一角铰接的第一连杆、与所述第一连杆的末端铰接的第二连杆、与所述第二连杆的末端连接的用于抓取生物材料罐的机械手,所述移动式平台上还设置有用于存放生物材料罐的储料架,所述储料架设置有出料位,所述第一连杆和第二连杆可被驱动从所述出料位抓取生物材料罐,并将所述生物材料罐投放到所述投放设备之外的地下水井中。能够临近遥控操作、远程遥控或者将来设置成自主运行的方式进行投放操作,通过第一连杆、第二连杆的联动,将生物材料罐从移动平台上抓取,然后投放到地下水井中。然后投放到地下水井中。然后投放到地下水井中。
技术开发人、权利持有人:邳学海

