1.本发明涉及激光清洗技术领域,更具体地说,它涉及一种智能化的清洗方法。
背景技术:
2.激光清洗是最近二十年发展起来的一项新型绿色清洗技术,该技术以高频脉冲激光作用在待清洗工件的表面,使污物以气化、燃烧、剥离等方式脱离工件表面,最终达到清洗的目的。
3.如授权公告号为cn107497784b,公告日为2020.05.19的中国专利公开了一种激光清洗方法,包括如下步骤:s1、在激光清洗装置上设置激光清洗轨迹;s2、确定待清洗区域;s3、按照激光清洗轨迹对待清洗区域进行激光清洗;所述步骤s1中,所述激光清洗轨迹的累进角度为45度,并通过使能填充的。
4.通过先设定激光清洗轨迹,来确定待清洗区域,即可按照激光清洗轨迹对待清洗区域进行激光清洗作业。但是激光清洗轨迹直接在激光清洗装置上设定,对于待清洗工件表面而言,各个部分的污染程度不同,简单直接的设定激光清洗轨迹无法精确清洗,导致清洗精度较差,并且需要多次清洗,影响清洗效率。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种智能化的清洗方法,能够根据清洗路线精准清洗,具有提高其清洗精度与效率的效果。
6.为实现上述目的,本发明提供了如下技术方案:
7.一种智能化的清洗方法,包括如下步骤,
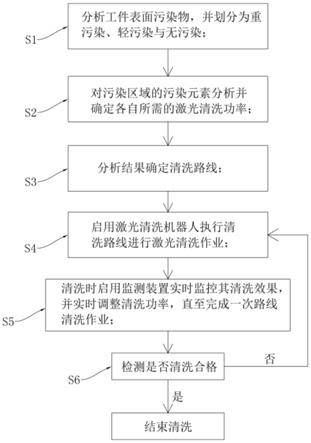
8.s1、对待清洗工件表面污染物进行分析,确定污染物分布区域与污染程度,并分别划分为重污染区域、轻污染区域以及无污染区域;
9.s2、对各个污染区域的污染元素进行分析,并根据分析结果确定各自所需要的激光清洗功率;
10.s3、根据待清洗工件污染物分析结果确定清洗路线,选择性清洗,对于重污染区域多次清洗,对于无污染区域不清洗,对于轻污染区域低功率快速清洗;
11.s4、由控制器将清洗路线的控制信号发送至激光清洗机器人上执行,以利用激光清洗机器人进行清洗,并在清洗过程中利用监测装置实时监控其清洗效果;
12.s5、控制器实时接收监控清洗效果信号,并分析清洗效果,实时控制激光清洗机器人调整清洗功率,完成一次清洗作业;
13.s6、通过清洗效果检测器配合于控制器判断待清洗工件是否清洗合格,若不合格,则返回步骤s4,直至清洗合格为止。
14.进一步设置:所述步骤s1利用工业视觉系统记录待清洗工件表面,以反馈至控制器上进行污染区域分析,利用光谱仪确定各个污染区域的污染程度,利用元素分析仪确定各个污染区域的污染元素。
15.进一步设置:所述步骤s1分析前对待清洗工件进行预处理,利用高压风机以及除尘滚刷的配合将其表面易脱落的污染物进行初步清理。
16.进一步设置:所述步骤s1对污染区域分析后利用超声波测厚仪分别检测各个污染区域的厚度大小,并反馈至控制器中记录。
17.进一步设置:所述步骤s3中清洗路线确定过程通过x轴、y轴以及z轴分别先后制定激光清洗头的移动路径,其中z轴路径根据控制器记录的厚度大小确定,保证激光清洗机器人移动过程中与待清洗工件的待清洗表面间距大小保持一致。
18.进一步设置:所述步骤s3的清洗路线的先后顺序为轻污染区域至重污染区域,并且对于重污染区域呈蛇形轨迹进行激光清洗。
19.进一步设置:对于重污染区域呈蛇形轨迹清洗过程中,配置辅助激光清洗头,设定辅助激光清洗头的清洗路线沿激光清洗机器人换线之间的间距路径进行移动。
20.进一步设置:所述辅助激光清洗头的激光功率小于激光清洗机器人的激光功率大小。
21.进一步设置:所述辅助激光清洗头与激光清洗机器人固定,且辅助激光清洗头的激光焦点紧邻于激光清洗机器人激光焦点朝向变换路径的一侧设置。
22.进一步设置:所述步骤s6中对不合格品在返回步骤s4中清洗时,激光清洗机器人的移动路径不变,将监测装置推送至激光清洗机器人移动线路之前的位置,并使其跟随激光清洗机器人一同移动,以利用监测装置提前确定区域内的污染程度,以反馈至控制器中调控激光清洗机器人的激光功率,再启用激光清洗机器人进行清洗作业。
23.通过采用上述技术方案,本发明相对现有技术相比,具有以下优点:
24.1、通过划分区域并分析污染元素,方便分析清洗路线,从而能够根据清洗路线精准清洗,节省反复清洗次数,具有提高其清洗精度与效率的效果;
25.2、通过监测装置实时监控清洗效果,方便实时调整激光清洗功率,避免对工件基材造成损伤,并保证激光清洗效果,提高清洗精度;
26.3、通过先预处理工件,能够对工件已脱落的污染物进行初步清理,从而便于准确分析工件表面污染物,并方便激光快速清洗,节省反复清洗次数,具有提高其清洗精度与效率的效果;
27.4、通过超声波测绘测定污染区域污染物的厚度,以便于在确定清洗路线时调整z轴的移动路径,保证清洗过程中,激光清洗的焦点始终位于待清洗工件的待清洗表面的污染物上,提高清洗精度;
28.5、通过先清洗轻污染区域再清洗重污染区域,能够减少区域切换过程中,激光功率调整的误差,并避免调整功率时给基材造成损害,提高激光清洗效果;
29.6、通过辅助激光清洗头来配合激光清洗机器人使用,便于对其切换路线时的间距误差进行清洗,避免间距误差残留杂质,提高对工件清洗的全面性,提高清洗效果;
30.7、通过推动监测装置移动至激光清洗机器人路线之前,能够对于二次以上的反复清洗进行先勘测工件污染程度,并调整激光功率后,再启用激光清洗机器人进行清洗作业,以提高往复清洗的激光清洗精度以及清洗效率。
附图说明
31.图1为智能化清洗方法的步骤顺序示意图。
具体实施方式
32.参照图1对智能化的清洗方法做进一步说明。
33.一种智能化的清洗方法,如图1所示,包括如下步骤,
34.s1、准备待清洗工件,利用高压风机以及除尘滚刷的配合将其表面易脱落的污染物进行初步清理,之后送至工件分析处,对待清洗工件表面污染物进行分析,利用工业视觉系统记录待清洗工件表面,以反馈至控制器上进行污染区域分析,利用光谱仪确定各个污染区域的污染程度,利用元素分析仪确定各个污染区域的污染元素,确定污染物分布区域与污染程度,并分别划分为重污染区域、轻污染区域以及无污染区域;其中,重污染区域包括含有难以清理的杂质以及杂质覆盖范围较大的区域,轻污染区域包括易清理杂质以及杂质覆盖范围较小的区域,以便于针对性确定激光清洗路径以及激光清洗的激光功率大小;
35.s2、对各个污染区域的污染元素进行分析,并根据分析结果确定各自所需要的激光清洗功率;接着利用超声波测厚仪分别检测各个污染区域的厚度大小,并反馈至控制器中记录,以记录各个区域内污染杂质的厚度范围;
36.s3、根据待清洗工件污染物分析结果确定清洗路线,清洗路线确定过程通过x轴、y轴以及z轴分别先后制定激光清洗头的移动路径,其中z轴路径根据控制器记录的厚度大小确定,保证激光清洗头移动过程中与待清洗工件的待清洗表面间距大小保持一致,以保证激光焦点始终落于工件的待清洗表面,使其清洗到位,提高清洗效果与速度;同时,路线确定的先后顺序为轻污染区域至重污染区域,并且对于重污染区域呈蛇形轨迹进行激光清洗,且进行选择性清洗,对于重污染区域多次清洗,对于无污染区域不清洗,对于轻污染区域低功率快速清洗,以针对性清洗,提高清洗效果与效率;其中,对于重污染区域呈蛇形轨迹清洗过程中,配置辅助激光清洗头,设定辅助激光清洗头的清洗路线沿激光清洗机器人换线之间的间距路径进行移动,且辅助激光清洗头的激光功率小于激光清洗机器人的激光功率大小,以便于对清洗激光清洗机器人路劲切换过程中的间距进行清理,保证工件得到全面清理,避免在切换间距中残油杂质,保证激光清洗效果;具体的,将辅助激光清洗头与激光清洗机器人固定,使其能够跟随激光清洗机器人的移动而直接移动,且辅助激光清洗头的激光焦点紧邻于激光清洗机器人激光焦点朝向变换路径的一侧设置,从而能够对激光清洗机器人变换路线时,辅助激光清洗头的激光焦点落于相邻向路线之间的间距误差之间,从而利用其进行辅助配合清洗,避免残留杂质,提高清洗效果;
37.s4、由控制器将清洗路线的控制信号发送至激光清洗机器人上执行,以利用激光清洗机器人进行清洗,并在清洗过程中利用监测装置实时监控其清洗效果;监测装置采用图像采集模块配合电脑以及显示屏进行使用,通过图像采集模块采集工件表面图案后,传输至电脑以及显示屏上,通过电脑将采集的图案与干净的工件图像作对比,即可快速判断清洗效果;
38.s5、控制器实时接收监控清洗效果信号,并分析清洗效果,实时控制激光清洗机器人调整清洗功率以及激光清洗机器人沿设定的路线移动,其移动速度根据污染程度划分,对于重污染区域,激光清洗机器人的移动速度较慢,对于轻污染区域,激光清洗机器人的移
动速度较快,直至完成一次清洗作业,以保证单次移动中重污染区域的有效清洗以及轻污染区域不损害工件基材的细化清洗,减少反复清洗次数,提高激光清洗效果以及激光清洗效率;
39.s6、通过清洗效果检测器配合于控制器判断待清洗工件是否清洗合格,若不合格,则返回步骤s4,直至清洗合格为止;其中,对于不合格品在返回步骤s4中清洗时,激光清洗机器人的移动路径不变,将监测装置利用推动气缸推送至激光清洗机器人移动线路之前的位置,并使其跟随激光清洗机器人一同移动,以利用监测装置提前确定区域内的污染程度,以反馈至控制器中调控激光清洗机器人的激光功率,再启用激光清洗机器人进行清洗作业,保证二次清洗时,激光功率与工件表面残留杂质的清洗需求适配,保证清洗效果,并且避免损坏工件基体。
40.通过上述技术方案,本发明能够合理制定清洗路线以及激光清洗功率,从而根据清洗路线精准清洗,减少反复清洗次数,并且在不损害工件基体的同时保证工件的全面清洗作业,具有提高其清洗精度与效率的效果。
41.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
技术特征:
1.一种智能化的清洗方法,其特征在于,包括如下步骤,s1、对待清洗工件表面污染物进行分析,确定污染物分布区域与污染程度,并分别划分为重污染区域、轻污染区域以及无污染区域;s2、对各个污染区域的污染元素进行分析,并根据分析结果确定各自所需要的激光清洗功率;s3、根据待清洗工件污染物分析结果确定清洗路线,选择性清洗,对于重污染区域多次清洗,对于无污染区域不清洗,对于轻污染区域低功率快速清洗;s4、由控制器将清洗路线的控制信号发送至激光清洗机器人上执行,以利用激光清洗机器人进行清洗,并在清洗过程中利用监测装置实时监控其清洗效果;s5、控制器实时接收监控清洗效果信号,并分析清洗效果,实时控制激光清洗机器人调整清洗功率,完成一次清洗作业;s6、通过清洗效果检测器配合于控制器判断待清洗工件是否清洗合格,若不合格,则返回步骤s4,直至清洗合格为止。2.根据权利要求1所述的一种智能化的清洗方法,其特征在于,所述步骤s1利用工业视觉系统记录待清洗工件表面,以反馈至控制器上进行污染区域分析,利用光谱仪确定各个污染区域的污染程度,利用元素分析仪确定各个污染区域的污染元素。3.根据权利要求2所述的一种智能化的清洗方法,其特征在于,所述步骤s1分析前对待清洗工件进行预处理,利用高压风机以及除尘滚刷的配合将其表面易脱落的污染物进行初步清理。4.根据权利要求2所述的一种智能化的清洗方法,其特征在于,所述步骤s1对污染区域分析后利用超声波测厚仪分别检测各个污染区域的厚度大小,并反馈至控制器中记录。5.根据权利要求2所述的一种智能化的清洗方法,其特征在于,所述步骤s3中清洗路线确定过程通过x轴、y轴以及z轴分别先后制定激光清洗头的移动路径,其中z轴路径根据控制器记录的厚度大小确定,保证激光清洗机器人移动过程中与待清洗工件的待清洗表面间距大小保持一致。6.根据权利要求1所述的一种智能化的清洗方法,其特征在于,所述步骤s3的清洗路线的先后顺序为轻污染区域至重污染区域,并且对于重污染区域呈蛇形轨迹进行激光清洗。7.根据权利要求6所述的一种智能化的清洗方法,其特征在于,对于重污染区域呈蛇形轨迹清洗过程中,配置辅助激光清洗头,设定辅助激光清洗头的清洗路线沿激光清洗机器人换线之间的间距路径进行移动。8.根据权利要求7所述的一种智能化的清洗方法,其特征在于,所述辅助激光清洗头的激光功率小于激光清洗机器人的激光功率大小。9.根据权利要求7所述的一种智能化的清洗方法,其特征在于,所述辅助激光清洗头与激光清洗机器人固定,且辅助激光清洗头的激光焦点紧邻于激光清洗机器人激光焦点朝向变换路径的一侧设置。10.根据权利要求1所述的一种智能化的清洗方法,其特征在于,所述步骤s6中对不合格品在返回步骤s4中清洗时,激光清洗机器人的移动路径不变,将监测装置推送至激光清洗机器人移动线路之前的位置,并使其跟随激光清洗机器人一同移动,以利用监测装置提前确定区域内的污染程度,以反馈至控制器中调控激光清洗机器人的激光功率,再启用激
光清洗机器人进行清洗作业。
技术总结
本发明公开了一种智能化的清洗方法,涉及激光清洗技术领域,其技术方案要点是:包括如下步骤,S1、对待清洗工件表面污染物进行分析,分别划分为重污染区域、轻污染区域以及无污染区域;S2、对各个污染区域的污染元素进行分析并确定各自所需要的激光清洗功率;S3、根据分析结果确定清洗路线选择性清洗;S4、由控制器将清洗路线的控制信号发送至激光清洗机器人上执行并在清洗过程中利用监测装置实时监控其清洗效果;S5、控制器实时分析清洗效果并实时调整清洗功率;S6、通过清洗效果检测器判断是否清洗合格,若否,则返回步骤S4直至清洗合格为止。本发明能够根据清洗路线精准清洗,减少反复清洗次数,具有提高其清洗精度与效率的效果。效果。效果。
技术开发人、权利持有人:陈水宣 洪昭斌 袁和平 马林

