1.本发明涉及激光清洗及清洗质量监测领域,具体是一种高精度激光清洗以 及清洗质量在线监测的装置及方法。
背景技术:
2.激光清洗是利用激光辐射工件表面,使表面的污染物、锈蚀物等吸收激光能 量后产生瞬间剥离或蒸发等变化,最终从基材上被有效去除的过程,是一种绿 色、高效的清洗方式,在工业生产和生活应用中逐渐被大众所接受,其中在模 具、国防武器装备、飞机废旧蒙皮油漆、楼宇外墙、精密仪器、电子工业、核 反应堆的管道和历史文物等领域中激光清洗技术均得到了长足发展。具有环境 友好、非接触、可精准控制等优点。
3.在激光清洗应用中,清洗的效果通常只有在清洗完全后才能进行测量,但清 洗过程中清洗参数的影响比如激光能量密度的高低、照射时间的长短等都会导 致基材损伤或清洗不干净,因此激光清洗效果在线监测非常重要。
4.但是由于激光清洗针对同种污染物的去除的机理都多种多样,清洗环境复 杂,目前常用的激光清洗质量监测方法如声波法,受环境影响较大,精度较低, 也无法实现对清洗效果的实时监测、记录及分析,且对设备要求较高、测量步 骤繁琐、耗费时间较长。
5.现有技术发明专利201911075973.0“一种激光清洗实时监测装置及方法”, 通过导电轮测试整块待清洗工件清洗前后的电阻值变化,利用电阻信号的改变 来实时反映激光清洗效果,但并不能对待清洗工件上的每一个部位的清洗情况 进行检测,待清洗工件表面一般都只凹凸不平整的表面,受环境影响较大,测 量准确度不够高,也不能对清洗效果较差的位置进行准确定位,不能保证清洗 效果。
技术实现要素:
6.本发明解决的问题是对待清洗工件上的每一个部位清洗情况进行检测,使 得实时检测结果受环境影响小、测量准确度高,对清洗效果较差的位置进行准 确定位,保证清洗效果。本发明提供了一种高精度激光清洗以及清洗质量在线 监测装置,其特征在于包括xy轴平台、激光清洗头、电阻探针阵列、电阻测量 仪、探针高度自适应调整单元和工作站,
7.所述激光清洗头包括激光头、振镜、场镜,激光清洗时,激光束从激光头 射出,依次通过所述振镜和场镜照射到放置于xy轴平台上的清洗工件的表面, 通过xy轴平台移动清洗工件来完成整个清洗工件的表面清洗工作;
8.所述的电阻探针阵列包括多个测电阻探针排列成的特定形状的探针阵列, 为正方形、长方形或者圆形探针阵列中的一种;
9.所述探针阵列中的每一个探针用于接触清洗工件表面上的点;
10.所述电阻测量仪与所述电阻探针阵列的电阻探针相连接(电连接),用于 测量清洗工件的表面上各点的电阻值;
11.所述探针高度自适应调整单元包括探针高度调整驱动器、微型导轨滑台, 所述探
针阵列固定在所述微型导轨滑台上,所述探针高度调整驱动器带动所述 微型导轨滑台滑动,进而带动所述探针阵列中的探针进行高度自适应调整;探 针高度调整驱动器为电机或其他驱动设备;
12.所述工作站包括清洗头控制模块、轴控控制模块、探针高度自适应调整控 制模块、电阻测量与采集控制模块和信号处理单元;
13.所述清洗头控制模块与激光清洗头电连接,用于控制激光头出光清洗放置 于xy轴平台上的清洗工件的表面;
14.所述轴控控制模块与xy轴平台通讯连接,用于控制xy轴平台沿x、y轴方 向移动,进而带动所述放置于xy轴平台上的清洗工件的表面沿x、y轴方向移 动,完成对洗工件的表面的清洗和对清洗工件的表面上各点的电阻值测量;
15.所述探针高度自适应调整控制模块与探针高度自适应调整单元通讯连接, 用于控制微型导轨滑台滑动,进而带动所述探针阵列中的探针进行高度自适应 调整;
16.所述电阻测量与采集控制模块与电阻测量仪通讯连接,用于电阻测量与采 集;所述电阻测量与采集控制模块与信号处理单元通讯连接;
17.所述信号处理单元接收电阻测量与采集控制模块的数据,并进行数据处理, 将处理后的数据进行判读,然后分别反馈给清洗头控制模块、轴控控制模块、 探针高度自适应调整控制模块,实现激光头出光、清洗工件的表面沿x和y轴 方向移动、探针高度自适应调整的激光清洗以及清洗质量在线监测。
18.所述的电阻探针阵列、探针高度自适应调整单元安装于所述激光清洗头的 一侧。
19.进一步地,所述电阻探针阵列可根据待清洗工件表面的面积大小确定电阻 探针阵列的电阻探针数量,根据待清洗工件表面的形状选择电阻探针阵列的排 列方式的形状,排列方式为正方形、长方形或者圆形中的一种。
20.进一步地,所述信号处理单元反馈给清洗头控制模块、轴控控制模块和探 针高度自适应调整控制模块实现激光清洗以及清洗质量在线监测的具体方法 为:
21.首先构建工艺试验得出的清洗工件表面各个位置(坐标)下的标准高度分 布数值,清洗工件表面各个坐标下的标准电阻值分布数值;
22.当激光清洗以及清洗质量在线监测时,通过探针高度自适应调整控制模块 适时调节探针高度,信号处理单元利用清洗工件表面位置信息(坐标)以及对 应的电阻值,得出工件表面各个坐标下的高度分布数值,同时得出工件表面各 个坐标下的电阻值分布数值;据此高度分布数值和电阻值分布数值,从而可以 监测不平整工件表面各处的清洗质量,并精确定位未清洗干净的部位。
23.所述探针高度自适应调整单元可适应各种表面凹凸不平的待清洗工件,可 自动调整探针高度,使得电阻探针阵列中的各探针均能接触到凹凸不平的工件 表面。
24.更进一步地,所述电阻仪测量的电阻测量精度为0.001毫欧。精度较高, 能够大大降低激光清洗激光环境如光照、噪音对监测系统的影响,对于不同环 境的适应性更强。
25.更进一步地,所述工作站通过轴控控制模块和探针高度自适应调整控制模 块,实时采集清洗工件表面位置信息(坐标)和对应的探针高度分布数值,采 用一阶滤波器进行滤波处理,减少测量误差。
26.本发明还提供一种高精度激光清洗以及清洗质量在线监测方法,包括以下 步骤:
27.s1、构建根据工艺试验得出的清洗工件表面各个坐标下的标准高度分布数 值,清洗工件表面各个坐标下的标准电阻值分布数值;
28.s2、根据待清洗工件表面的面积大小选择探针阵列的排列方式和数量;排 列方式为正方形、长方形或者圆形中的一种;
29.s3、根据清洗工艺要求,调整电阻测量仪的测量精度;
30.s4、通过工作站控制探针高度自适应调整单元和电阻测量仪带动电阻探针 阵列完成整个清洗工件表面的清洗和电阻测量;
31.在清洗过程中,探针高度自适应调整单元自动调整探针高度,使得各探针 均能接触到凹凸不平的工件表面;
32.通过所述信号处理单元实时采集所述测电阻探针的水平位置(坐标)信息、 探针高度信息和各水平位置点的电阻信息;
33.所述信号处理单元利用待清洗工件表面位置(坐标)信息以及对应的探针 高度值和电阻值,得出工件表面各个坐标下的高度值分布数值,同时得到工件 表面各个坐标下的电阻值分布数值;据此高度分布数值和电阻值分布数值,从 而监测不平整工件表面各处的清洗质量,并精确定位未清洗干净的部位。
34.具体地,所述步骤s1中构建标准高度分布数值和标准电阻值分布数值,根 据不同的清洗工件基材进行工艺试验得出。
35.具体地,所述步骤s4中监测不平整工件表面各处的清洗质量的判据为:
36.当某个坐标下电阻仪测量的电阻值与清洗干净时的电阻值差值大于10%时, 则判断该工件在该坐标下未清洗干净,反之则为清洗干净,对该清洗工件所有 坐标都进行判断。
37.本发明通过采用高度可调的测电阻探针与轴控系统结合,将清洗工件表面 位置信息、探针高度信息和电阻值信息相结合,先构建出清洗工件表面各个位 置(坐标)下的标准高度分布数值,清洗工件表面各个位置(坐标)下的标准 电阻值分布数值;然后利用待清洗工件表面位置(坐标)信息以及对应的探针 高度值和电阻值,得出工件表面各个坐标下的高度值分布数值,同时得到工件 表面各个坐标下的电阻值分布数值;据此高度分布数值和电阻值分布数值,从 而监测不平整工件表面各处的清洗质量,并精确定位未清洗干净的部位。根据 待清洗工件表面的面积大小确定电阻探针阵列的数量,根据待清洗工件表面的 形状选择电阻探针阵列的排列方式和形状。探针高度自适应调整装置,可适应 各种表面凹凸不平的清洗工件,可自动调整探针高度,使得电阻探针阵列中的 各探针均能接触到凹凸不平的工件表面,使得对待测工件表面的检测完整准确。
38.工作站输入适合的参数控制激光清洗头扫描直线对清洗工件进行清洗,同 时控制xy轴平台进行运动,使激光清洗头清洗到材料表面所有污染物。采用的 电阻测量精度可达0.001毫欧,精度较高,能够大大降低激光清洗激光环境如 光照、噪音对监测系统的影响,对于不同环境的适应性更强。总之,本发明对 待清洗工件上的每一个部位清洗情况进行检测,使得实时检测结果受环境影响 小、测量准确度高,对清洗效果较差的位置进行准确定位,保证清洗效果。
附图说明
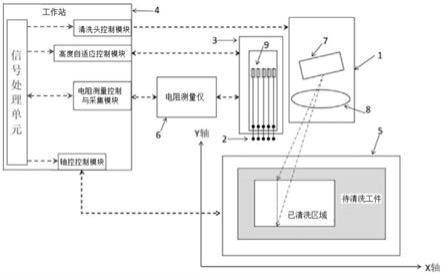
39.图1为本发明的激光清洗以及清洗质量在线监测装置示意图;
40.图2为本发明的电阻探针阵列的排列方式形状图。
41.其中:1-激光清洗头,2-电阻探针阵列,3-探针高度自适应调整装置,4
-ꢀ
工作站,5-xy轴平台,6-电阻测量仪,7-激光振镜,8-第一场镜,9-电机和微 型导轨滑台,10-信号处理单元,11-电阻探针。
具体实施方式
42.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实 施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅 仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实 施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
43.实例一:
44.参照图1,本发明提供了一种高精度激光清洗以及清洗质量在线监测装置, 其特征在于包括xy轴平台、激光清洗头、电阻探针阵列、电阻测量仪、探针高 度自适应调整单元和工作站,
45.所述激光清洗头包括激光头、振镜、场镜,激光清洗时,激光束从激光头 射出,依次通过所述振镜和场镜照射到放置于xy轴平台上的清洗工件的表面, 通过xy轴平台移动清洗工件的表面来完成整个清洗工件的表面清洗工作;
46.所述的电阻探针阵列包括多个测电阻探针排列成的特定形状的探针阵列, 为正方形、长方形或者圆形探针阵列中的一种;所述电阻探针阵列可根据待清 洗工件表面的面积大小确定电阻探针阵列的电阻探针数量,根据待清洗工件表 面的形状选择电阻探针阵列的排列方式的形状。本实施例探针阵列的排列方式 为正方形,有2cm*2cm、5cm*5cm和10cm*10cm三种,若待清洗工件表面的面积 小于25cm2,则选择2cm*2cm的方形电阻探针阵列;若待清洗工件表面的面积大 于等于25cm2且小于100cm2,则选择5cm*5cm的方形电阻探针阵列;若待清洗 工件表面的面积大于等于100cm2,则选择10cm*10cm的方形探针阵列;本实施 例选2cm*2cm。
47.所述探针阵列中的每一个探针用于接触清洗工件表面上的点;
48.所述电阻测量仪与所述电阻探针阵列的电阻探针相连接(电连接),用于 测量清洗工件的表面上各点的电阻值;
49.所述探针高度自适应调整单元包括探针高度调整驱动器、微型导轨滑台, 所述探针阵列固定在所述微型导轨滑台上,所述探针高度调整驱动器带动所述 微型导轨滑台滑动,进而带动所述探针阵列中的探针进行高度自适应调整;探 针高度调整驱动器为伺服电机或其他驱动设备;本实施例中伺服电机安装于导 轨滑台中控制滑台的的移动,电机驱动器控制伺服电机的运动。
50.所述的电阻探针阵列、探针高度自适应调整单元安装于所述激光清洗头的 一侧。
51.所述工作站包括清洗头控制模块、轴控控制模块、探针高度自适应调整控 制模块、电阻测量与采集控制模块和信号处理单元;
52.所述清洗头控制模块与激光清洗头电连接,用于控制激光头出光清洗放置 于xy
轴平台上的清洗工件的表面;
53.所述轴控控制模块与xy轴平台通讯(电)连接,用于控制xy轴平台沿x、 y轴方向移动,进而带动所述放置于xy轴平台上的清洗工件的表面沿x、y轴方 向移动,完成对洗工件的表面的清洗和对清洗工件的表面上各点的电阻值测量;
54.所述探针高度自适应调整控制模块与探针高度自适应调整单元通讯连接, 用于控制微型导轨滑台滑动,进而带动所述探针阵列中的探针进行高度自适应 调整;
55.所述电阻测量与采集控制模块与电阻测量仪通讯连接,用于电阻测量与采 集;所述电阻测量与采集控制模块与信号处理单元通讯连接;
56.所述信号处理单元接收电阻测量与采集控制模块的数据,并进行数据处理, 将处理后的数据进行判读,然后分别反馈给清洗头控制模块、轴控控制模块、 探针高度自适应调整控制模块,实现激光头出光、清洗工件的表面沿x和y轴 方向移动、探针高度自适应调整的激光清洗以及清洗质量在线监测。
57.具体地,在清洗工件表面经过初步清洗后,所述信号处理单元接收电阻测 量与采集控制模块、轴控控制模块和探针高度自适应调整控制模块的数据,并 进行数据处理,将处理后的数据进行判读,找出清洗工件表面未被清洗干净的 地方,实现清洗质量在线监测;
58.在准备再次清洗所述清洗工件未被清洗干净的表面时,所述信号处理单元 将在清洗工件表面经过初步清洗后所得到的数据处理结果,反馈给清洗头控制 模块、轴控控制模块和探针高度自适应调整控制模块,实现针对清洗工件未被 清洗干净的表面的再次清洗和清洗质量在线监测。
59.所述信号处理单元反馈给清洗头控制模块、轴控控制模块和探针高度自适 应调整控制模块实现激光清洗以及清洗质量在线监测的具体方法为:
60.首先构建工艺试验得出的清洗工件表面各个位置(坐标)下的标准高度分 布数值,清洗工件表面各个坐标下的标准电阻值分布数值;
61.当激光清洗以及清洗质量在线监测时,通过探针高度自适应调整控制模块 适时调节探针高度,信号处理单元利用清洗工件表面位置信息(坐标)以及对 应的电阻值,得出工件表面各个坐标下的高度分布数值,同时得出工件表面各 个坐标下的电阻值分布数值;据此高度分布数值和电阻值分布数值,从而可以 监测不平整工件表面各处的清洗质量,并精确定位未清洗干净的部位。
62.所述探针高度自适应调整单元可适应各种表面凹凸不平的待清洗工件,可 自动调整探针高度,使得电阻探针阵列中的各探针均能接触到凹凸不平的工件 表面。
63.实例二:
64.本实施例与实例一的不同之处在于所述电阻仪测量的电阻测量精度为 0.001毫欧,精度较高,能够大大降低激光清洗激光环境如光照、噪音对监测系 统的影响,对于不同环境的适应性更强。
65.本实施例选择5cm*5cm的方形电阻探针阵列。
66.其余内容同实例一。
67.实例三:
68.本实施例与实例一的不同之处在于所述工作站通过轴控控制模块和探针高 度自
适应调整控制模块,实时采集清洗工件表面位置信息(坐标)和对应的探 针高度分布数值,探针高度分布数值采用一阶滤波器进行滤波处理,减少测量 误差。
69.本实施例选择10cm*10cm的方形电阻探针阵列。所述电阻仪测量的电阻测 量精度具体选0.001毫欧。
70.其余内容同实例一。
71.实例四:
72.本发明还提供一种高精度激光清洗以及清洗质量在线监测方法,包括以下 步骤:
73.s1、构建根据工艺试验得出的清洗工件表面各个坐标下的标准高度分布数 值,清洗工件表面各个坐标下的标准电阻值分布数值;
74.s2、根据待清洗工件表面的面积大小选择探针阵列的排列方式和数量;排 列方式为正方形、长方形或者圆形中的一种;
75.s3、根据清洗工艺要求,调整电阻测量仪的测量精度;
76.s4、通过工作站控制探针高度自适应调整单元和电阻测量仪带动电阻探针 阵列完成整个清洗工件表面的清洗和电阻测量;
77.具体地,通过工作站控制清洗头控制模块,控制激光头出光清洗放置于xy 轴平台上的清洗工件的表面;控制轴控控制模块,控制xy轴平台沿x、y轴方 向移动,进而带动所述放置于xy轴平台上的清洗工件沿x、y轴方向移动,配 合激光头和电阻探针阵列探针完成整个清洗工件表面的清洗和电阻测量并向信 号处理单元传达电阻探针的水平位置信息(坐标);控制电阻测量与采集控制 模块,用于采集电阻测量仪测得的各个电阻探针的电阻值并传达给信号处理单 元;
78.在清洗过程中,探针高度自适应调整控制模块控制探针高度自适应调整单 元自动调整探针高度,使得各探针均能接触到凹凸不平的工件表面并向信号处 理单元传达探针高度信息;
79.通过所述信号处理单元实时采集所述测电阻探针的水平位置(坐标)信息、 探针高度信息和各水平位置点的电阻信息;
80.所述信号处理单元利用待清洗工件表面位置(坐标)信息以及对应的探针 高度值和电阻值,得出工件表面各个坐标下的高度值分布数值,同时得到工件 表面各个坐标下的电阻值分布数值;据此高度分布数值和电阻值分布数值,从 而监测不平整工件表面各处的清洗质量,并精确定位未清洗干净的部位。
81.具体地,所述步骤s1中构建标准高度分布数值和标准电阻值分布数值,根 据不同的清洗工件基材进行工艺试验得出。
82.具体地,所述步骤s4中监测不平整工件表面各处的清洗质量的判据为:
83.当某个坐标下电阻仪测量的电阻值与清洗干净时的电阻值差值大于10%时, 则判断该工件在该坐标下未清洗干净,反之则为清洗干净,对该清洗工件所有 坐标都进行判断。
84.本实施例中根据工艺实验数据,建立不同的清洗工件基材清洗效果与电阻 值的对应关系,本实施例以材料为铝板的清洗工件为例,另一个实施例中以材 料为铜板的清洗工件为例,如表1所示;
85.表1工艺试验标准电阻数据
86.清洗工件的材料工件清洗干净时各个点坐标下测得的电阻平均值铝155.2472ω铜1.5847ω
技术特征:
1.一种高精度激光清洗以及清洗质量在线监测装置,其特征在于包括xy轴平台、激光清洗头、电阻探针阵列、电阻测量仪、探针高度自适应调整单元和工作站,所述激光清洗头包括激光头、振镜、场镜,激光清洗时,激光束从激光头射出,依次通过所述振镜和场镜照射到放置于xy轴平台上的清洗工件的表面,通过xy轴平台移动清洗工件的表面来完成整个清洗工件的表面清洗工作;所述的电阻探针阵列包括多个测电阻探针排列成的特定形状的探针阵列,为正方形、长方形或者圆形探针阵列中的一种;所述探针阵列中的每一个探针用于接触清洗工件表面上的点;所述电阻测量仪与所述电阻探针阵列的电阻探针相连接,用于测量清洗工件的表面上各点的电阻值;所述探针高度自适应调整单元包括探针高度调整驱动器、微型导轨滑台,所述探针阵列固定在所述微型导轨滑台上,所述探针高度调整驱动器带动所述微型导轨滑台滑动,进而带动所述探针阵列中的探针进行高度自适应调整;所述工作站包括清洗头控制模块、轴控控制模块、探针高度自适应调整控制模块、电阻测量与采集控制模块和信号处理单元;所述清洗头控制模块与激光清洗头电连接,用于控制激光头出光清洗放置于xy轴平台上的清洗工件的表面;所述轴控控制模块与xy轴平台通讯连接,用于控制xy轴平台沿x、y轴方向移动,进而带动所述放置于xy轴平台上的清洗工件的表面沿x、y轴方向移动,完成对洗工件的表面的清洗和对清洗工件的表面上各点的电阻值测量;所述探针高度自适应调整控制模块与探针高度自适应调整单元通讯连接,用于控制微型导轨滑台滑动,进而带动所述探针阵列中的探针进行高度自适应调整;所述电阻测量与采集控制模块与电阻测量仪通讯连接,用于电阻测量与采集;所述电阻测量与采集控制模块还与信号处理单元通讯连接;所述信号处理单元接收电阻测量与采集控制模块的数据,并进行数据处理,将处理后的数据进行判读,然后分别反馈给清洗头控制模块、轴控控制模块、探针高度自适应调整控制模块,实现激光头出光、清洗工件的表面沿x和y轴方向移动、探针高度自适应调整的激光清洗以及清洗质量在线监测。2.根据权利要求1所述的装置,其特征在于所述电阻探针阵列可根据待清洗工件表面的面积大小确定电阻探针阵列的电阻探针数量,根据待清洗工件表面的形状选择电阻探针阵列的排列方式的形状,排列方式为正方形、长方形或者圆形中的一种。3.根据权利要求1或2所述的装置,其特征在于所述信号处理单元反馈给清洗头控制模块、轴控控制模块和探针高度自适应调整控制模块实现激光清洗以及清洗质量在线监测的具体方法为:首先构建工艺试验得出的清洗工件表面各个坐标下的标准高度分布数值,清洗工件表面各个坐标下的标准电阻值分布数值;当激光清洗以及清洗质量在线监测时,通过探针高度自适应调整控制模块适时调节探针高度,信号处理单元利用清洗工件表面位置信息(坐标)以及对应的电阻值,得出工件表面各个坐标下的高度分布数值,同时得出工件表面各个坐标下的电阻值分布数值;据此高
度分布数值和电阻值分布数值,从而可以监测不平整工件表面各处的清洗质量,并精确定位未清洗干净的部位。4.根据权利要求3所述的装置,其特征在于所述电阻仪测量的电阻测量精度为0.001毫欧。5.根据权利要求1所述的装置,其特征在于所述工作站通过轴控控制模块和探针高度自适应调整控制模块,实时采集清洗工件表面位置信息和对应的探针高度分布数值,采用一阶滤波器进行滤波处理,减少测量误差。6.一种高精度激光清洗以及清洗质量在线监测方法,其特征在于包括以下步骤:s1、构建根据工艺试验得出的清洗工件表面各个坐标下的标准高度分布数值,清洗工件表面各个坐标下的标准电阻值分布数值;s2、根据待清洗工件表面的面积大小选择探针阵列的排列方式的数量;s3、根据清洗工艺要求,调整电阻测量仪的测量精度;s4、通过工作站控制探针高度自适应调整单元和电阻测量仪带动电阻探针阵列完成整个清洗工件表面的清洗和电阻测量;在清洗过程中,探针高度自适应调整单元自动调整探针高度,使得各探针均能接触到凹凸不平的工件表面;通过所述信号处理单元实时采集所述测电阻探针的水平位置信息、探针高度信息和各水平位置点的电阻信息;所述信号处理单元利用待清洗工件表面位置信息以及对应的探针高度值和电阻值,得出工件表面各个坐标下的高度值分布数值,同时得到工件表面各个坐标下的电阻值分布数值;据此高度分布数值和电阻值分布数值,从而监测不平整工件表面各处的清洗质量,并精确定位未清洗干净的部位。7.根据权利要求6所述的方法,其特征在于所述步骤s1中构建标准高度分布数值和标准电阻值分布数值,根据不同的清洗工件基材进行工艺试验得出。8.根据权利要求6-7任一项所述的方法,其特征在于所述步骤s4中监测不平整工件表面各处的清洗质量的判据为:当某个坐标下电阻仪测量的电阻值与清洗干净时的电阻值差值大于10%时,则判断该工件在该坐标下未清洗干净,反之则为清洗干净,对该清洗工件所有坐标都进行判断。
技术总结
本发明公开了一种高精度激光清洗以及清洗质量在线监测的装置,包括包括XY轴平台、激光清洗头、电阻探针阵列、电阻测量仪、探针高度自适应调整单元和工作站。本发明对待清洗工件上的每一个部位清洗情况进行检测,使得实时检测结果受环境影响小、测量准确度高,对清洗效果较差的位置进行准确定位,保证清洗效果。保证清洗效果。保证清洗效果。
技术开发人、权利持有人:李志翔 何崇文 余海龙 万楚豪 李方志 叶建军 何啸

